Automatic Optical Satellite Data Processing Chain
Fully automatic processing of satellite data is a dream for every remote sensing professional. Within the Slovenian Centre of Excellence for Space Sciences and Technologies (SPACE-SI) we have done first steps towards fulfilling this dream. We have developed and implemented a complete fully automatic processing chain (called STORM) that includes all necessary processing steps from sensor-corrected (Level 1) optical satellite image up to web-delivered map-ready products.
The three major processing steps of our STORM processing chain are same as for every common processing workflow of optical satellite data (these are: geometric pre-processing, radiometric pre-processing and finally different automatic interpretations), however with one crucial difference: all steps are performed near real-time and fully automatic (i.e. no operator’s intervention).
The STORM processing chain was developed and fully tested on RapidEye imagery (high resolution pushbroom sensor). After the first implementation support to other sensors is being added, among other also some sensors of very high resolution. Various parts of the STORM processing chain currently support the sensors RapidEye, WorldView, THEOS, Pleaides, SPOT 6, Landsat 4-8, PROBA-V and the full-frame sensor of the NEMO-HD satellite.
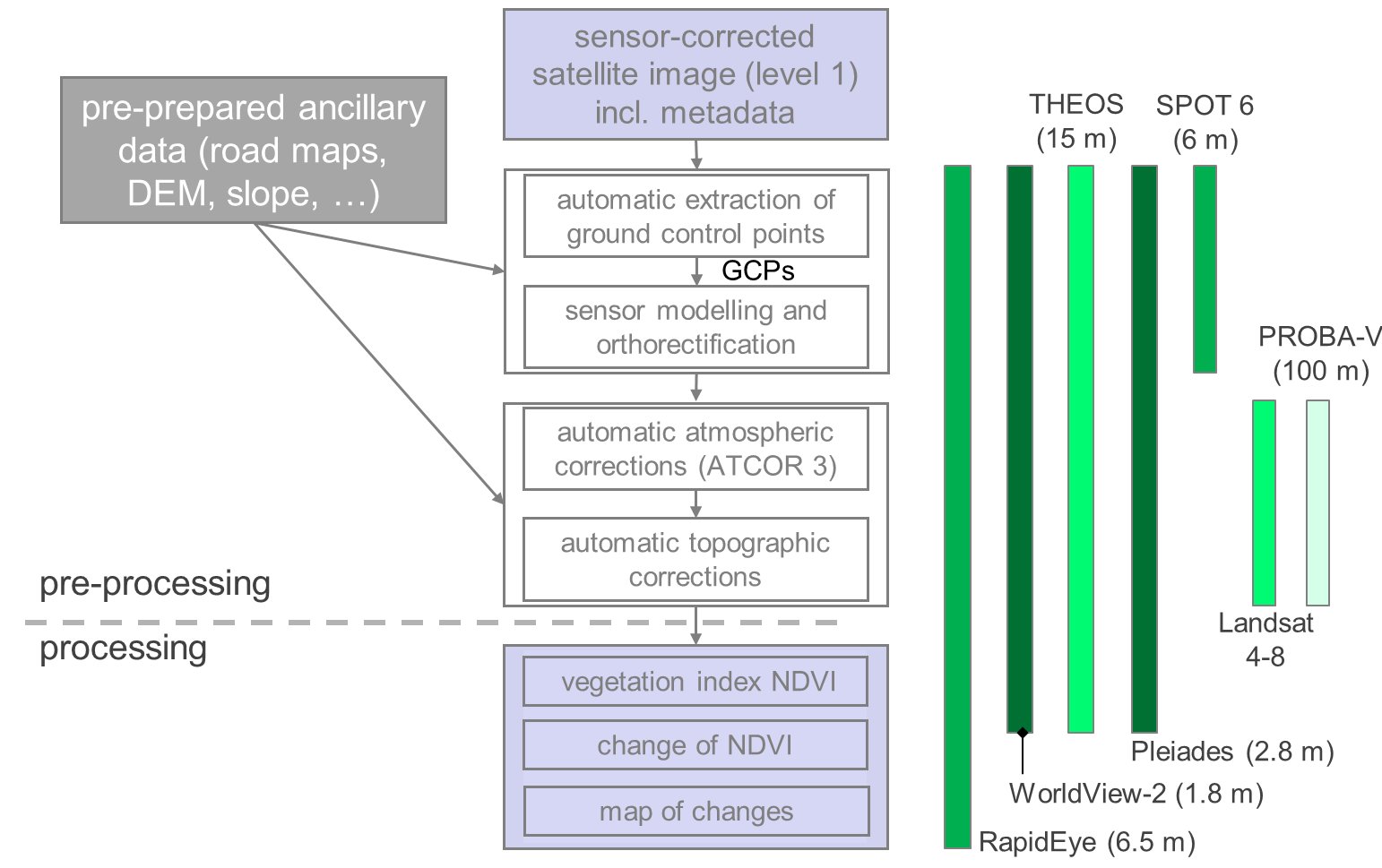
Workflow of the STORM processing chain, developed by SPACE-SI.
Description of individual modules within the STORM processing chain
- automatic extraction of ground control points (based on image matching onto the reference road maps),
- automatic image orthorectification based on a physical sensor model at the moment of image acquisition (the model accommodates full-frame and pushbroom sensors),
- automatic image orthorectification based on RPC model
- automatic atmospheric correction (solved with ATCOR 3 from ReSe)
- automatic topographic normalization (that combines physical approach with Minnaert method and utilizes anisotropic illumination model), and
- automatic generation of user-oriented products (Change Detection; vegetation index NDVI; Change of NDVI).
Modules are prepared in IDL, Python and C++. The main control module and web viewer however are prepared in Java. The chain is triggered by the appearance of new satellite image on the dedicated FTP server. Immediately after processing all chain products are available to the end user via the web mapping application (note: from a single input image 5 final product are generated). The chain currently supports several national coordinate systems and the global UTM system.
Poster Prototype of an Automatic Near Real-Time Satellite Image Processing Chain, presented on ESA/CNES Small Satellites Systems and Services – The 4S Symposium 2012 (June 4th-8th 2012, Portorož, Slovenia) (click to enlarge)
")